
Blog Post Series: From KL Divergence to Variational Autoencoder in PyTorch
In this series of four posts, I attempt to build up the theory, mathematics, and intuition of variational autoencoders (VAE), starting with some basic fundamentals and then moving closer and closer to a full PyTorch implementation with each post.
The ultimate goal of the series is to provide the full picture of variational autoencoders, all the way from expected values to Python classes. The first two posts discuss the general theory and derivations of variational inference and understanding the evidence lower bound (ELBO). The third post evolves general theory to VAE-specific theory. The fourth post establishes the final connections between theory and code, provides a full VAE implementation written in PyTorch, and shows some interesting experiments.

Posts:
- A Quick Primer on KL Divergence. KL divergence is fundamental tool that is used everywhere in this series. This is a quick introduction for those who may not be familiar already.
- Latent Variable Models, Expectation Maximization, and Variational Inference. This post dives into latent variable models and how to train them. It also introduces expectation maximization (EM), which is very related to the VAE.
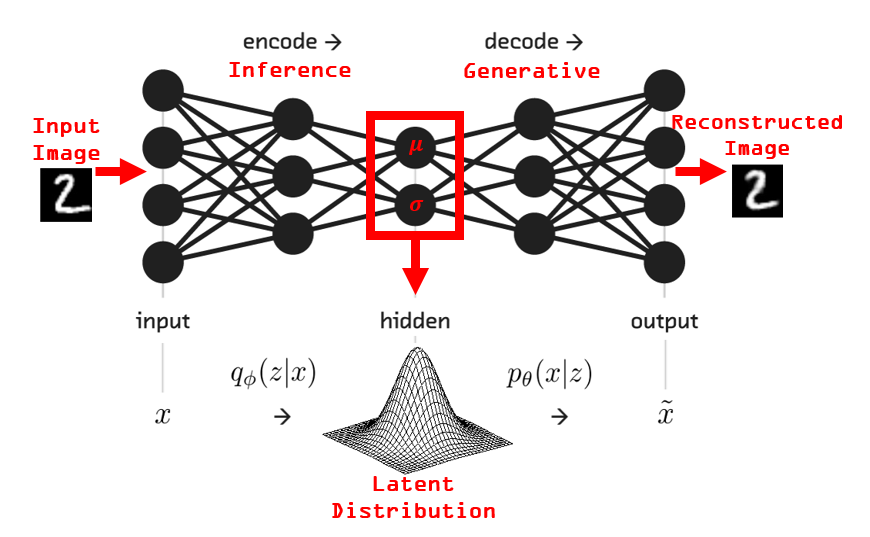
- Variational Autoencoder Theory. Develops the theory of variational inference into the VAE objective function and discusses how the VAE model architecture is designed to achieve specific probabilistic goals.
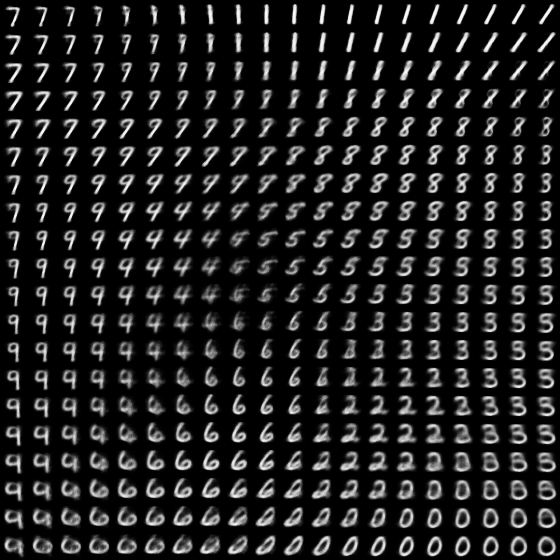
- Variational Autoencoder Code and Experiments. The culmination of the series, this post draws the final connections between the theoretical framework of variational autoencoders and a PyTorch implementation.